English
English 中文简体
中文简体 русский
русский Español
Español عربى
عربى Механические принципы интеллектуальных манипуляторов в основном включают в себя следующие аспекты:
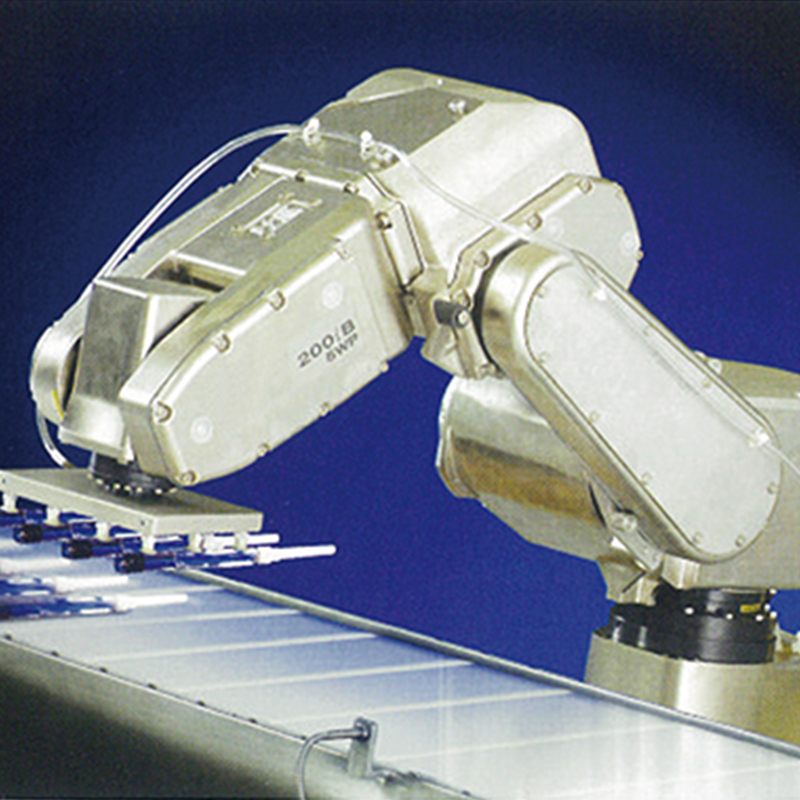
1. Структура. Интеллектуальные манипуляторы обычно состоят из нескольких соединений и шатунов, образующих подвижную механическую конструкцию. Суставы приводятся в движение двигателями и передающими устройствами, которые могут осуществлять движение каждого сустава, тем самым обеспечивая гибкую работу манипулятора.
2. Механическая передача. Суставы интеллектуальных манипуляторов обычно приводятся в движение посредством передаточных устройств (таких как шестерни, приводные ремни и т. д.). Трансмиссия преобразует вращение двигателя в движение суставов, позволяя манипулятору выполнять точные захваты и операции.
3. Теоретическая механика. Движение интеллектуального манипулятора можно описать и проанализировать с помощью кинематики и динамики теоретической механики. Кинематика изучает связь между геометрическими характеристиками, положением и скоростью манипулятора, а динамика изучает закономерности движения манипулятора под действием сил и моментов.
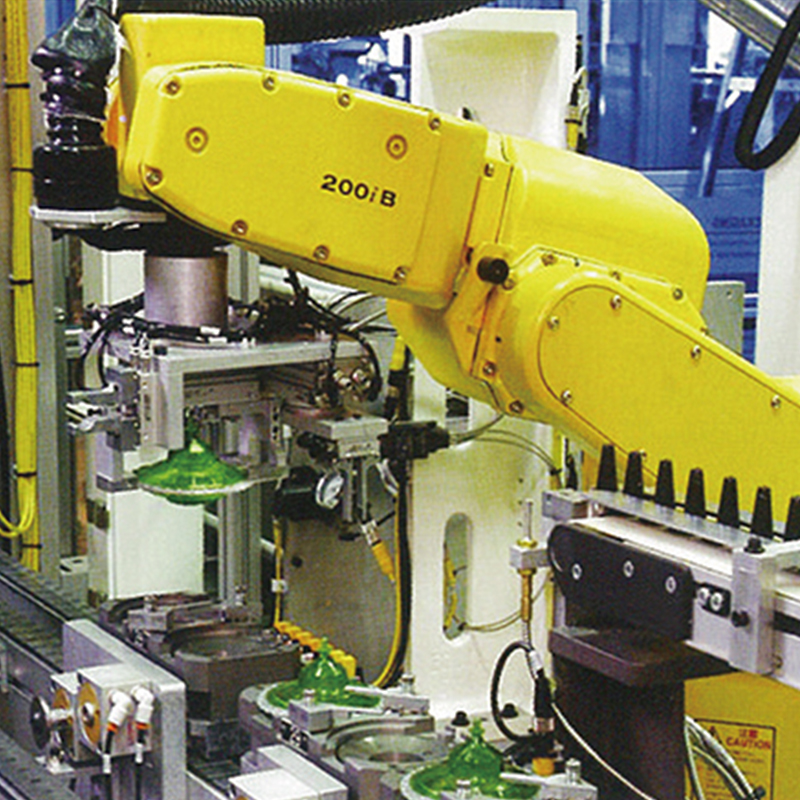
4. Система управления. Интеллектуальные манипуляторы обычно оснащены системой управления, которая управляет двигателем для достижения точного перемещения манипулятора. Система управления может сочетать датчики и технологию программирования для реализации автоматизированной работы интеллектуальных манипуляторов в зависимости от требований задачи.
В целом механический принцип интеллектуального манипулятора основан на комплексном применении механической конструкции, передающего устройства и системы управления для достижения гибкого движения и точной работы манипулятора.