Особенности продукта:
1. Привод трехосного серводвигателя. В этой роботизированной руке в качестве приводного устройства используется усовершенствованный трехосевой серводвигатель, обеспечивающий высокую точность, высокую скорость и высокую стабильность. Благодаря системе сервоуправления он может обеспечить точное управление положением и планирование траектории движения, отвечая различным сложным эксплуатационным требованиям.
2. Продольная конструкция. По сравнению с традиционными поперечными роботизированными манипуляторами продольная конструкция обеспечивает более плавную работу роботизированного манипулятора во время рабочего процесса, снижая вибрацию и шум. В то же время продольная конструкция может также обеспечить большее рабочее пространство, облегчая операторам обслуживание и настройку.
3. Двухсекционная конструкция с одной рукой. Роботизированная рука имеет двухсекционную конструкцию с одной рукой, что делает ее более гибкой при захвате и размещении объектов. Двухсекционная конструкция может выполнять независимые действия по отдельности, повышая эффективность работы и точность работы.
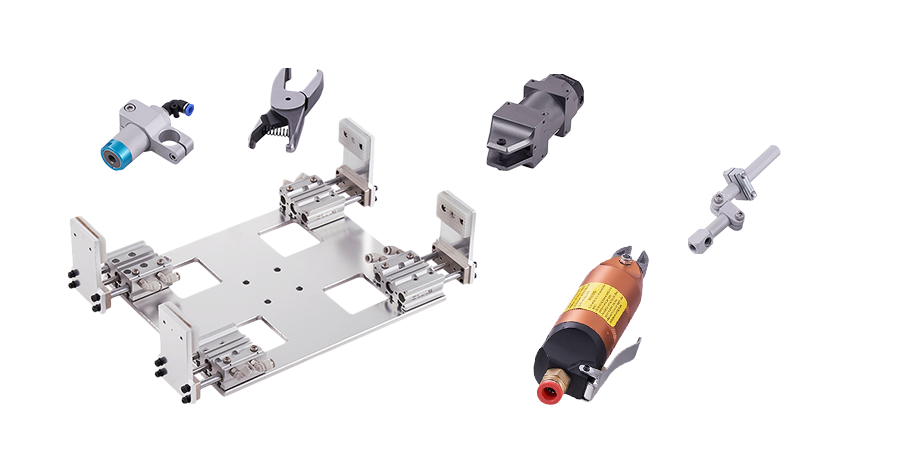
4. Возможность адаптации к нескольким захватам: роботизированная рука оснащена несколькими захватами, которые можно заменять в соответствии с различными требованиями работы. Будь то присоски, захваты или магнитные захваты, все они могут хорошо взаимодействовать с роботизированной рукой, обеспечивая захват и размещение различных объектов разных форм и материалов.
5. Программируемое управление. Роботизированная рука оснащена программируемым контроллером, позволяющим управлять и управлять посредством программирования. Пользователи могут писать соответствующие программы в соответствии с реальными потребностями, обеспечивая автоматизацию производственных и эксплуатационных процессов.
Преимущества продукта:
1. Высокоточное позиционирование. Высокоточное управление трехосным серводвигателем позволяет роботизированной руке достигать точного контроля положения и планирования траектории движения. Будь то захват или размещение предметов, он может точно выполнить задачу, гарантируя качество продукции и эффективность производства.
2. Высокоскоростное движение. Высокоскоростная характеристика серводвигателя позволяет роботизированной руке быстро выполнять операции захвата и размещения. По сравнению с традиционными пневматическими или гидравлическими методами привода скорость движения серводвигателя намного выше, что значительно повышает эффективность работы.
3. Стабильная работа. Высокая стабильность серводвигателя позволяет роботизированной руке поддерживать стабильную работу во время рабочего процесса. Будь то непрерывная работа в течение длительного времени или частые операции старт-стоп, роботизированная рука может поддерживать стабильную работу, снижая риск сбоев и простоев.
4. Высокая гибкость. Двухсекционная конструкция одной руки делает роботизированную руку более гибкой при захвате и размещении объектов. Двухсекционная структура может выполнять независимые действия по отдельности, что позволяет гибко настраивать и выполнять операции в соответствии с фактическими потребностями.
5. Широкие возможности адаптации. Роботизированная рука оснащена несколькими захватами, позволяющими адаптироваться к захвату и размещению объектов различной формы и материала. Будь то металл, пластик, стекло или другие материалы, с помощью замены захвата можно выполнить соответствующие операции.
6. Программируемое управление. Наличие программируемого контроллера позволяет роботизированному манипулятору автоматизировать производственные и эксплуатационные процессы. Пользователи могут писать соответствующие программы в соответствии с реальными потребностями, обеспечивая автоматизацию работы и контроля, повышая эффективность производства и точность работы.
7. Простота обслуживания. Конструкция продольной конструкции обеспечивает более плавную работу роботизированной руки во время рабочего процесса, снижая вибрацию и шум. В то же время продольная конструкция может также обеспечить большее рабочее пространство, облегчая операторам обслуживание и настройку.
8. Безопасность и надежность. Роботизированная рука оснащена современными защитными устройствами, такими как датчики столкновений, защита от перегрузки и т. д., обеспечивающие безопасность оператора. В то же время скорость и сила движения роботизированной руки точно контролируются и регулируются, что позволяет избежать рисков неправильной работы и повреждения объектов.
В заключение, трехосный серводвигатель с продольным однорычажным двухсекционным роботизированным манипулятором обладает высокой точностью, высокой скоростью, высокой стабильностью, высокой гибкостью, широкой адаптируемостью, программируемым управлением, простотой обслуживания, безопасностью и надежностью, а также функциями и преимуществами. Он может удовлетворить различные сложные эксплуатационные требования, повысить эффективность производства и качество продукции и является незаменимым важным оборудованием в современной обрабатывающей промышленности.


 English
English 中文简体
中文简体 русский
русский Español
Español عربى
عربى